Վերջերս JSR-ի հաճախորդ-ընկերներից մեկը անհատականացրեց ռոբոտ-եռակցման ճնշման բաքի նախագիծը: Հաճախորդի աշխատանքային մասերն ունեն տարբեր բնութագրեր, և կան բազմաթիվ մասեր, որոնք պետք է եռակցվեն: Ավտոմատ ինտեգրված լուծում նախագծելիս անհրաժեշտ է հաստատել, թե արդյոք հաճախորդը կատարում է հաջորդական եռակցում, թե կետային եռակցում, ապա ամբողջությամբ օգտագործում է ռոբոտը: Պետք է արվի: Այս ընթացքում ես նկատեցի, որ նա կասկածներ ուներ դիրքորոշիչի ընտրության վերաբերյալ, ուստի JSR-ը համառոտ ներկայացրեց այն բոլորին:
Երկկայանանի միառանցքանի գլխիկի և պոչիկի ուղղահայաց շրջման դիրքորոշիչ
VS Եռաառանցքային ուղղահայաց շրջադարձային դիրքորոշիչ
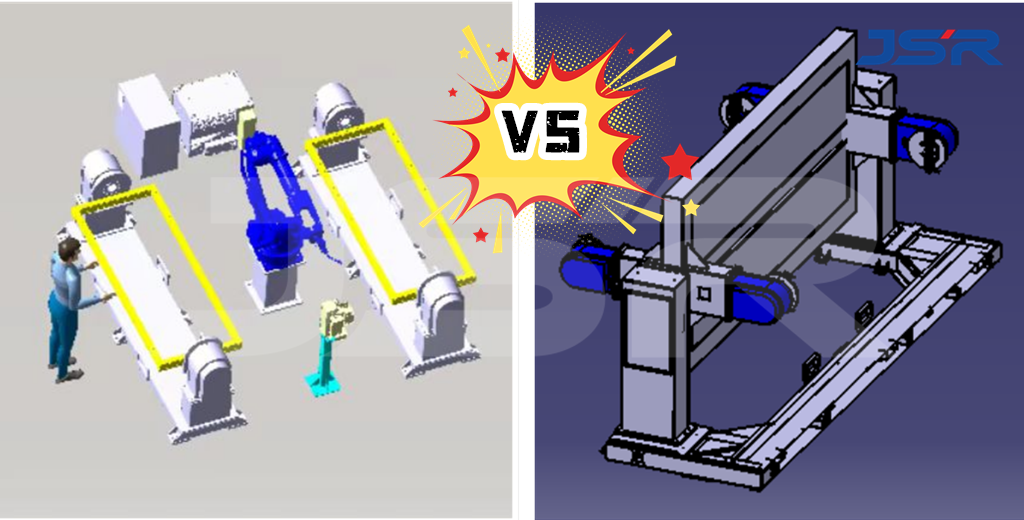
Ռոբոտային եռակցման աշխատանքային կայանում երկկայանանի, միաառանցքանի գլխիկի և պոչիկի ուղղահայաց շրջադարձային դիրքորոշիչը և եռաառանցքանի ուղղահայաց շրջադարձային դիրքորոշիչը երկու տարածված դիրքորոշման սարքավորումներ են, և դրանք ունեն իրենց առավելությունները տարբեր կիրառման սցենարներում:
Ստորև ներկայացված են դրանց կիրառման սցենարները և համեմատությունները.
Երկկայանով միաառանցք գլխի և պոչի շրջանակի դիրքորոշիչ.
Այն հարմար է այն դեպքերի համար, երբ եռակցման գործընթացի ընթացքում անհրաժեշտ է պտտել և դիրքավորել աշխատանքային մասը: Օրինակ՝ մեքենայի թափքի եռակցման արտադրական գծում երկու աշխատանքային մաս կարող է միաժամանակ տեղադրվել երկու կայաններում, և աշխատանքային մասերի պտտումն ու դիրքավորումը կարող է իրականացվել միառանցք գլխի և պոչային կոթի դիրքավորիչի միջոցով, այդպիսով բարելավելով արտադրության արդյունավետությունը:
https://youtube.com/shorts/JPn-iKsRvj0
Եռաառանցք ուղղահայաց շրջադարձային դիրքորոշիչ.
Իդեալական է բարդ եռակցման սցենարների համար, որոնք պահանջում են աշխատանքային մասերի պտտում և շրջում բազմաթիվ ուղղություններով: Օրինակ, ավիատիեզերական արդյունաբերության մեջ անհրաժեշտ է ինքնաթիռի ֆյուզելյաժների բարդ եռակցում: Եռաառանցքային ուղղահայաց շրջման դիրքորոշիչը կարող է իրականացնել աշխատանքային մասի բազմաառանցքային պտույտ և շրջում հորիզոնական և ուղղահայաց ուղղություններով՝ տարբեր անկյուններից եռակցման կարիքները բավարարելու համար:
https://youtu.be/v065VoPALf8
Առավելությունների համեմատություն.
Երկկայանով միաառանցք գլխի և պոչի շրջանակի դիրքորոշիչ.
- Պարզ կառուցվածք, հեշտ է գործել և պահպանել։
- Երկու աշխատանքային կտոր կարող է մշակվել միաժամանակ՝ արտադրության արդյունավետությունը բարձրացնելու համար։
- Հարմար է որոշ ավելի պարզ եռակցման աշխատանքների համար, ինչպիսիք են պտտման մեկ առանցք պահանջող աշխատանքային մասերը։
- Գինը ավելի էժան է, քան երեք առանցքային ուղղահայաց շրջադարձային դիրքորոշիչը:
- Եռակցումը կատարվում է ձախ և աջ կայանների միջև փոխարկմամբ։ Մեկ կայանում եռակցելիս աշխատողները պետք է նյութերը բեռնեն և բեռնաթափեն մյուս կողմից։
Եռաառանցք ուղղահայաց շրջադարձային դիրքորոշիչ.
- Այն կարող է իրականացնել բազմաառանցքային պտույտ և շրջում և հարմար է բարդ եռակցման աշխատանքների համար։
- Ռոբոտային եռակցման ժամանակ աշխատողները պետք է ավարտեն աշխատանքային մասերի բեռնումն ու բեռնաթափումը միայն մեկ կողմից:
- Ապահովում է ավելի մեծ դիրքորոշման ճկունություն և ճշգրտություն, որը կարող է բավարարել տարբեր եռակցման անկյունների պահանջները։
- Հարմար է բարձր եռակցման որակի և ճշգրտության պահանջներով աշխատանքային մասերի համար։
Ամփոփելով՝ համապատասխան դիրքորոշիչի ընտրությունը կախված է եռակցման կոնկրետ առաջադրանքի պահանջներից, ներառյալ այնպիսի գործոններ, ինչպիսիք են աշխատանքային մասի բարդությունը, եռակցման անկյունը, արտադրության արդյունավետությունը և եռակցման որակի պահանջները:
Հրապարակման ժամանակը. Փետրվարի 20-2024
